Visualizing temperature in a Boltzmann policy
![]()
The Boltzmann policy normalizes the final Q values using a softmax function and uses the resulting values as probabilities, selecting an action much like a stochastic policy.
\[P(a_i) = \frac{\exp(Q_{a_i})}{\sum_{a \in A} \exp(Q_a)}\]
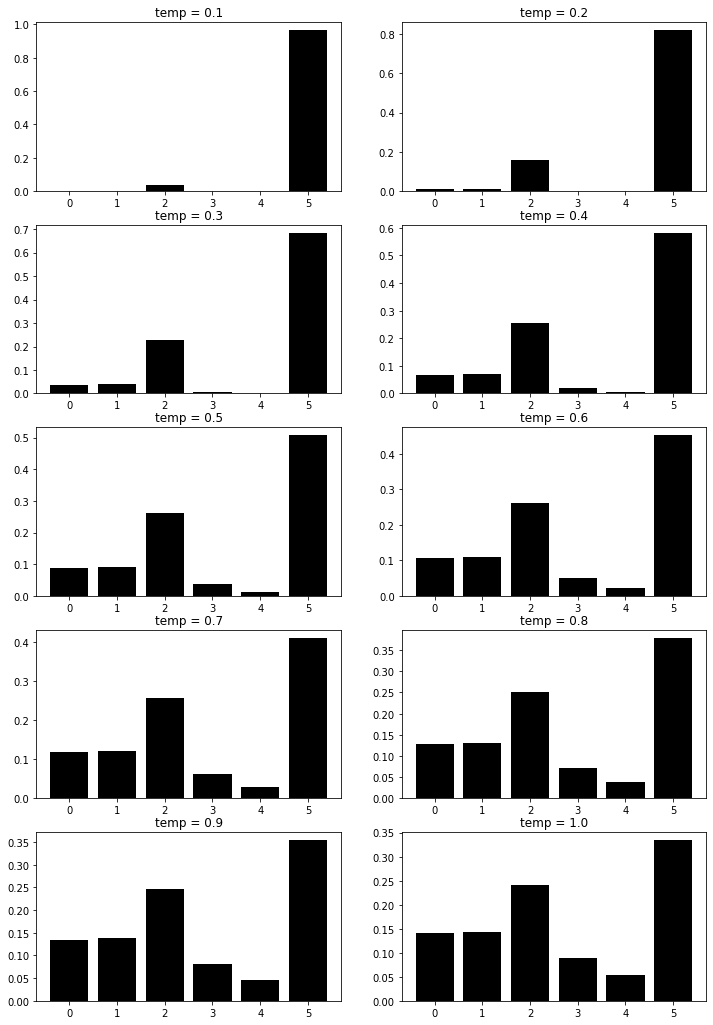
An additional step is to use a temperature parameter \(\tau\) to control the spread of the probabilities between actions.
\[P(a_i) = \frac{\exp(Q_{a_i}/\tau)}{\sum_{a \in A}\exp(Q_a/\tau)}\]
In this notebook, I visualize the effect of different values of \(\tau\) in a generated discrete distribution.
%matplotlib inline
import torch
from torch.distributions.normal import Normal
import matplotlib as mpl
import matplotlib.pyplot as plt
mpl.style.use('grayscale')
For this test, I’ll generate a bunch of Q values from a normal distribution with \(\mu=0\) and \(\sigma=1\). I’ll then use values of \(\tau=\{0.1, 0.2, \ldots, 1\}\) to generate the final distributions.
qs=Normal(0, 1).sample((6,))
nrows, ncols = 5, 2
fig, axes = plt.subplots(nrows, ncols, figsize=(12, 18))
temps = torch.linspace(.1, 1, nrows * ncols)
for i in range(nrows):
for j in range(ncols):
t_index=i * ncols + j
t = round(float(temps[t_index]), 1)
qs_prob=(qs / t).softmax(-1)
ax=axes[i, j]
ax.bar(range(qs_prob.shape[0]), qs_prob)
ax.set_title('temp = {}'.format(t))
Enjoy Reading This Article?
Here are some more articles you might like to read next: